摘要:地面风的风速和风向是影响无人机精确回收的重要因素。本文设计并实现200米以下地面风实时测量系统,以四轴飞行器为搭载平台、热温差式风速传感器为测量手段、stm32板为下位机、ZigBee为通讯模块,可替代传统手持式测风仪,精确获取不同高度的风速风向数据,并对正逆风和侧逆风两种不同模式下的精确回收进行分析,论文首先进行系统的整体方案设计,包括硬件设计、软件设计和测量数据的应用分析。接着按照各个章节展开,选择合适硬件搭建平台,编写下位机程序,设计通讯网络,开发上位机显示界面,建立无人机精确回收模型并进行实测数据分析。研究成果对提高伞降回收型无人机的回收精度具有一定参考意义。
关键词:地面风测量、STM32板、ZigBee协议、热温差式风速传感器、无人机回收模型
1前言
信息化条件下,战场环境瞬息万变,对无人机保障分队来说,无人机的回收无疑是作战任务的关键环节。因此,测量风速风向并计算它对无人机回收的影响具有一定应用价值。无人机精确回收是影响无人机安全的重要因素,而传统的手持式测风仪在进行风速风向测量时,只能测得10米以下地面风,无法完全测得各个高度的气流情况,无法为无人机精确安全回收哦提供数据支持。正是基于这些原因,我们设计了地面风测量系统。相比于传统手持式测风仪,地面风测量系统能够获取200米以下不同高度的风速数据,并实时回传到地面端进行显示。根据这些数据,回收站人员能更加准确地判断无人机因气流产生的回收偏差,迅速完成回收任务。
2 实时测风系统设计
平台设计主要包括搭载平台构建以及飞控设计,具体包括平台及动力组件,飞控组件,测风仪组件和测量软件组件。
2.1系统总体框架结构
为了满足200米地面风测量要求,系统设计的总体条件必须满足:
飞行高度:≤300m
起飞重量:≤2kg
续航时间:≤25min
最大载荷:1kg
控制距离:≤2km
工作温度:-10~50℃
系统框架结构如图1所示。

图1 平台总体框架图
2.2平台设备选型
2.2.1飞控组件选型
1. NAZA-M V2飞控作为成熟的飞行控制器,能够良好的控制四旋翼飞行器按照预定指令飞行,且飞行安全稳定性良好,能够满足系统硬件要求。该飞控机有着低电压保护,失控保护,平稳悬停等优点。
2. FS-iA6B遥控套装,包含遥控器及接收机,通信稳定度高,误码率小,通信距离超过两公里,能够满足控制飞行器的要求。
3.IMU AHRS导航传感器集成stm32f103、MPU6050、HMC5883L、BMP180,能够实时获取模块的三维姿态角,角加速度,航向角,以及气压高度。
2.2.2测风组件选型
风速传感器
传统风速传感器体积大,质量重,功耗较高等等缺点。例如传统的风杯式风速传感器,受到的风阻力较大,会影响无人机平台的飞行稳定。我们希望在保证精度,减小系统的负荷的同时保证飞行稳定,于是我们选用了且远CHWVN风速传感器。
CHWVN风速传感器采用热膜原理制作,核心是个薄片状(热模)的加热元件,控制加热元件的温度恒定(简单的传感器热模本身有温度稳定作用)。温度高了减少加热电流使温度回落,反之亦然。空气通过热膜带走热量,带走的热量多少和空气流量相关。将风速传感器的供电接口、数据传输接口与stm32小系统板相连接,为了保证stm32板所串联的系统工作正常,加入变压电源,电阻和电容,确保系统安全稳定工作。
该传感器量程为0-30m/s,对应电压为0-2.5V,当达到最大风速30m/s时,此时电压值为2.5V,用电压替代风速将数值传给下位机STM32f103zet6,完成风速数据采集。
通过实验,得出原始测量曲线和输出曲线的对比。
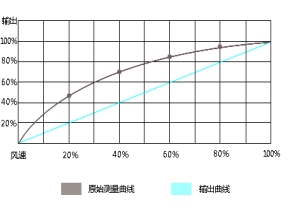
图2 风速测量对比图
2.2.3 机体及动力组件选型
四旋翼飞行器的飞行高度和起飞重量规定了四旋翼机架的稳定性、飞行动力系统的效率要求以及飞行器的整体布局。
S500机架综合考虑到机架的稳定性、质量结构的合理性,有足够的空间搭载传感器、ZigBee通信模块以及stm32系统板,布局合理,满足系统硬件要求。
为了保证飞行器有足够的续航时间以及起飞重量,权衡质量与电源容量的矛盾关系,选用5200mAh 35c 4s LIPO电池,保证了飞行器的能源供应以及技术要求。
2312/800Kv电机、30A电调、以及9450自锁桨为飞行器提供了足够的升力,保证了飞行器的飞行高度、速度以及载重能力。
3地面风测量软件设计
地面风测量系统软件设计包括通信网络系统,下位机开发和上位机界面显示。下位机要实现风速传感器与stm3板与Zigbee模块数据连接,上位机则主要是开发显示界面。
3.1通信网络系统选型与构成
3.1.1 STM32
本次设计采用了STM32系列的处理器STM32F103ZET6。基于先进的ARM-Cortex-M3内核,STM32系列微控制器提供最高达512KB的片上闪存,配备大容量的SRAM。相较于传统的单片机,STM32系列微处理器主要有以下优点:
(1)使用了哈佛结构,数据和指令的读取可以同时调用读取
(2)出众的功耗效率 。使得用户在享受高性能的同时,承担低消耗;
(3)内部集成度高。内嵌8MHZ的RC振荡电路、看门狗定时器、电源控制器、16位PWM同步AC定时器、ADC采样通道等丰富的资源大大降低了开发的复杂性;
(4)灵活的静态存储控制器。它有4块独立的分区支持外部存储器,并可以从外部存储器中执行代码,没有严格的编码要求,简化了开发流程。
3.1.2 ZigBee协议
在短距离无线通讯应用中,三种相对成熟的通讯技术分别为Wifi、ZigBee、蓝牙。本系统采用ZigBee技术搭建通讯模块,主要是因为考虑到如下几条性能:传输距离合适、工作耗能较小、回传稳定可靠。基于以上优点,我们在该四轴飞行器地面风测量系统在设计通讯模块时使用了Zigbee技术,以此构架整个通讯网络。
3.2下位机开发设计
3.2.1下位机开发环境
下位机开发用了Keil uVision5编译器、JTAG仿真器J-Link。Keil uVision5编译器完美支持stm32F系列内核Cortex-M3的程序编译,除此之外,与普通的ARM开发工具相比Keil uVision5提供了直接可用的Bootloader启动文件,能节省开发时间。J-Link作为程序下载器与控制器,与Keil uVision5配合使用能够对ARM的运行进行控制,有效烧写程序。
3.3上位机界面设计
3.3.1上位机界面开发环境
上位机显示界面使用的开发平台是Visual Studio 2017,开发工具是C#。Visual Studio在众多软件开发平台中相对成熟可靠,与Eclipse相比,Visual Studio运行速度更快、配置更简单,开发过程中使用Visual Studio.NET自动化模型能提高效率,适合用于开发地面风测量系统上位机显示界面。
3.3.2上位机界面开发
地面风测量系统最终要实现风速数据可视化,需要在上位机开发相关软件。使用Visual Studio 2017作为开发平台,C#作为开发工具。流程如下:
1.打开Visual Studio 2017,在菜单栏的“文件”菜单中选择“新建”―“项目”,之后选中“通用Windows”,建立窗体程序,其中项目名“上位机”。
2.使用工具箱添加button按钮、label标签、textbox文本框、combobox组合框等公共控件,在属性框的Text修改标题名和控件名。
3.将控件移入窗口,调整属性,形成初步界面。
4.编写各个控件代码,调用api函数,获得串口数据。
5.生成界面。代码编译后,右击“项目”―“生成”,在“生成”菜单栏中选择“生成 上位机”,在保存项目文件的bin―Debug中找到“上位机.exe”子文件,运行便可。

图3 最终显示界面
4地面风测量数据收集与应用分析
4.1无人机精确回收模型
无人机的伞降回收是一个由飞行运动状态到逐步减速,最后稳定着陆状态的渐变过程。在无人操控的情况下遥控无人机进行伞降回收,伞降回收运动分析包括:伞降系统开伞过程、伞降系统气动阻力等。在此基础上,与无人机伞降回收过程时刻相关的风场变化是另外一个分析的重点内容。综合以上所述情况,使用相应的回收方法才能实现无人机稳定回收的目标。
无人机伞降回收系统的基本工作流程如下图所示:
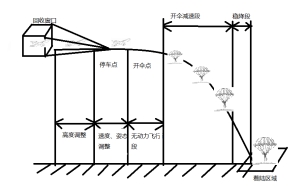
图4 无人机伞降回收系统基本流程图
从上图可以看出,整个无人机伞降回收系统的运动过程可以用以下6个步骤来描述:
1.无人机处于飞行状态,等待地面控制站发出回收信号;
2.无人机接收到回收信号,进入回收状态,飞机尾部弹射出引导伞;
3.空气将引导伞充满,起到减速牵引作用;
4.引导伞弹出并打开主伞包,主伞包在空气作用下进入充气状态;
5.主伞完全打开充满,飞机悬挂在降落伞下方进入稳降状态;
6.飞机安全着陆,机伞分离。
4.2风场对回收模型影响分析
结合实际情况,将无人机的回收分为两个阶段:
1.停车开伞至伞位于飞机正上方
当停车开伞时,设定飞机速度为160km/h,此时飞机受到自身的重力(G)、随速度而变化的机翼升力(F翼)以及随伞打开不断增大的升力(F伞),它的值可以用下面的式子来表示: 式中,
式中, 为空气密度1.29kg/m,v为飞机速度,Sx为机翼面积3.1037m²,Cl为升力系数。在此过程中,伞的升力随伞面积和形状的变化一直在变,降落伞在空气中运动时会有空气动力产生,而且降落伞是钝头体,体积大质量轻,所受到的空气动力与一般物体有很大差别。若要研究该块内容,则需了解降落伞动力学特性。
为空气密度1.29kg/m,v为飞机速度,Sx为机翼面积3.1037m²,Cl为升力系数。在此过程中,伞的升力随伞面积和形状的变化一直在变,降落伞在空气中运动时会有空气动力产生,而且降落伞是钝头体,体积大质量轻,所受到的空气动力与一般物体有很大差别。若要研究该块内容,则需了解降落伞动力学特性。
2.伞位于飞机正上方至飞机着陆
此时,机翼升力、伞的升力及飞机自身重力这三个力可以近似认为保持不变。则无人机回收的误差仅需考虑水平方向的位移,即风速带来的影响。
(1)风速与风压的换算
风压就是垂直于气流方向的平面所受到的风的压力。根据伯努利方程得出风――压的关系,风的动压可由下面的式子来表示: ,式中,r为空气密度,取0.01225KN/m³(标准状态下,气压为1013hPa,温度为15℃),g取9.8m/s²,所以:
,式中,r为空气密度,取0.01225KN/m³(标准状态下,气压为1013hPa,温度为15℃),g取9.8m/s²,所以: 由风的动压的单位可知,要想换算成力的表示形式,还需要知道迎风受力的面积。在这里关于飞机迎风受力面积,我们参考任务载荷升降机构的最大截面积,即飞机机头和天线部分,不考虑机翼、方向舵和垂尾等的影响。通过估算得到迎风受力面积约为0.1平方米,而伞的迎风面积约为70平方米,因此仅考虑伞的迎风受力面积。可以得到,若风速差为2m/s且在下落过程中保持稳定,则飞机水平方向受力约为175N。
由风的动压的单位可知,要想换算成力的表示形式,还需要知道迎风受力的面积。在这里关于飞机迎风受力面积,我们参考任务载荷升降机构的最大截面积,即飞机机头和天线部分,不考虑机翼、方向舵和垂尾等的影响。通过估算得到迎风受力面积约为0.1平方米,而伞的迎风面积约为70平方米,因此仅考虑伞的迎风受力面积。可以得到,若风速差为2m/s且在下落过程中保持稳定,则飞机水平方向受力约为175N。
(2)水平方向误差估算
根据F=ma,飞机最大起飞重量200kg,所以水平方向加速度a=0.87m/s²。由以往的回收经验可知,该阶段降落时间约为15s。再根据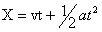 ,v取0m/s,则可估算出水平方向的误差约为99m。
,v取0m/s,则可估算出水平方向的误差约为99m。
4.3正逆风对回收模型影响分析
所谓正逆风,指的是风速与回收航向平行。因课题研究需要,此处相对风速差指的是手持测风仪与风速传感器的相对差值,下面是根据不同的相对风速差通过公式换算和迭代得到的表和图。

图5 正逆风对位移偏差量的影响
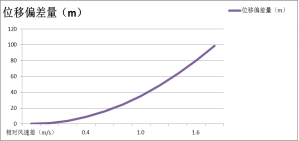
图6 正逆风时相对风速差与位移偏差量的函数关系
公式: 1、 (面积取70m²)
(面积取70m²)
2、 (质量取200kg)
(质量取200kg)
3、 (v取0m/s,t取15s)
(v取0m/s,t取15s)
4、
由上图可知,当相对风速差与位移偏差量在正逆风时,两者构成一元二次函数
4.4侧逆风对回收模型影响分析
考虑实际情况,在无人机的伞降回收过程中风速并不一定与回收航向平行,即所谓的侧逆风。因无人机回收时需逆风回收,过大的角度范围并无实际意义,所以研究的角度仅选取-20°至+20°。下面是通过计算处理绘制成的表格:


图7 侧逆风对方向偏差量和距离偏差量的影响
通过上表计算得到的方向偏差量和距离偏差量,利用MATLAB得到如下二图。由图可知,例如当风速差为1(m/s),角度为0时,距离偏差量为24.75(m),方向偏差量为0。
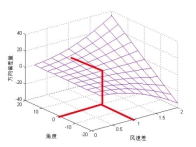
图8 风速差与角度对方向偏差的影响
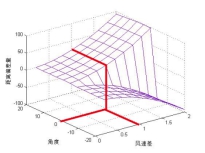
图9 风速差与角度对距离偏差的影响
由<, /SPAN>图可知,每一组风速差和角度的数据,一一对应于一组方向和距离的偏差量,再将方向偏差量和距离偏差量进行勾股定理运算,即可得到综合偏差量。通过对综合偏差量数据的处理分析,得出结论如图所示:
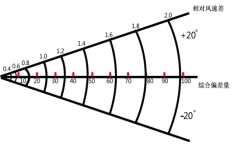
图10 不同风速和角度对综合偏差量的影响
当风速差一定时,不同角度带来的仅是方向上的偏差,即这里的-20°至+20°。由此可见,在无人机进行伞降回收时,其风速风向的影响是不可避免的。
5小结
本文设计的地面风测量系统较好地解决了200米以下地面风实时测量,并能将风速风向数据实时显示于上位机界面端,具有直观可靠等优点。数据分析结果表明,与传统手持式测风仪相比,能较好提高无人机的回收精度,对无人机精确回收具备参考意义和应用价值。
参考文献:
【1】周慧. 四旋翼飞行器及其控制系统研究[D].兰州:西北师范大学,2015:7-9.
【2】王聪. 基于STM32微型四轴飞行器及控制软件的设计[D].大连:大连交通大学,2015:8-10.
【3】曹延超. 基于STM32的四旋翼飞行器姿态测量系统设计[D].北京:北京邮电大学计算机学院,2015:11-13.
【4】彭小青. ZigBee无线传感器网络与ASP.NET技术应用于智能粮仓的初步设计[D].南昌:东华理工大学,2016:13-15.
【5】赵云辉. 无人机伞降回收系统建模与控制策略研究[D].南京:南京航空航天大学研究生院自动化学院,2012:31-32.