防汽车追尾预警安全距离数学模型
1. 建模背景
Ø 现在我们国家汽车保有量已经越来越多,每年增加几千万辆;
Ø 2011年全国涉及人员伤亡的道路交通事故210812起,共造成62387
人死亡。如果算上没有人身伤亡的交通事故或未立案的交通事故,
估计每年要在百万起以上。
Ø 据统计,追尾在汽车交通事故中比例最高的,尤其高车速的追尾更
会造成车毁人亡。
Ø 但是,现在只有极少数高级轿车有防追尾的自动预警刹车系统,迫
切需要开发出低成本的普及型追尾预警系统,在两车相对速度和相对
距离超出防追尾安全限度时,防追尾预警系统会自动刹车减速或会发
出语音报警。
2. 要解决的问题
如何根据两车的相对速度,计算出应该发出预警的相对车距?
3. 论文概述
使用物理学中距离和速度及加速度的公式,推导出预警距离和两车相对速度的二次函数关系,汽车制动的加速度可以作为防追尾预警系统数学模型的一个参数项,选取不同的汽车制动加速度,可以得出不同的预警距离和相对速度关系曲线。
4. 研究
4.1 设计的防追尾预警系统的工作原理
在后车中的激光测距装置能够实时监测与前车的车距和相对速度,采用电脑控制,根据预警距离和两车相对速度的数学模型,能够自动计算出应该何时预警。高级汽车的预警信号可以触发自动刹车系统,预警后自动制动减速;中低档车的预警系统可以给出语音报警,提醒驾驶员及时制动减速。由于人接收预警信号的反应时间和自动预警刹车系统的反应时间不同,两者的数学模型会有所差异,本文下面只讨论人工接收预警信号刹车的情况。
4.2 数学模型的导出
设在同一方向同一车道上同时行驶着两辆汽车A和B,前面的汽车A行驶速度为V1(米/秒),后面的汽车B行驶速度为V2(米/秒),V2 > V1,两车相对速度为V(米/秒),V = V2-V1; 两车相对距离为S(米);如下图(图一),

4.2 数学模型的导出
假设汽车A一直是以速度V1(米/秒)匀速行驶,汽车B接到追尾预警信号后刹车的平均制动加速度是a(米/秒2)
按物理学公式: 制动距离
 (公式1), 为制动时间,
(公式1), 为制动时间,
制动后两车速度至少是相同的,也就是说制动后两车相对速度为0米/秒,所以有
V=V2-V1 = at (公式2)
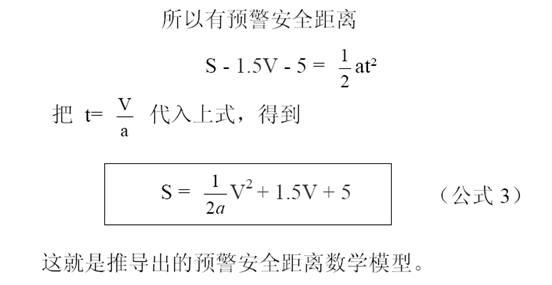
在推导预警安全距离数学模型时还要考虑以下两种情况:
(1)实际预警制动后,后车速度降低到与前车相同时,两车应该有一个安全距离,可以设这个距离为5 米。
所以预警安全距离应该是两车距离减去5 米 .
即

(2)估算汽车追尾预警系统接收到激光测距信号后,给出警报的时间为0.15秒,人接收语音报警信号到开始采取制动措施的时间为1.0秒,制动器发生作用的时间为0.35秒(这里时间都是为了建模而给的估算时间,实际应用时可以通过实际测量得到真实的时间)。
所以在采取制动措施之前,后车A相对前车B以相对速度V行
驶了时间t0,t0=0.15+1.0+0.35= 1.5(秒)
也就是说,从探测到两车相对距离和相对速度,到预警后制动时,两辆车的相对距离又缩短了Vt0 (米), 即1.5V (米)
4.3 数学模型中制动加速度a的取值范围
小客车从100千米/小时的速度刹车到0千米/小时,紧急刹车制动距离是37~48米左右,这里取紧急刹车制动距离40米左右作为计算制动加速度a的依据,这时候汽车的制动加速度应该是最大制动加速度。
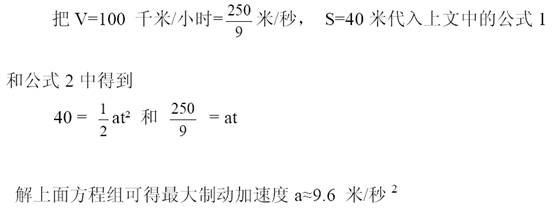
所以预警安全距离数学模型(公式3)中的参数a可以取值(0~9.6),考虑到制动效果和乘车人的舒适性,建议参数a取适中值5~6米/秒2 。
4.4 参数a取不同数值的预警安全距离和两车相对速度的关系曲线图
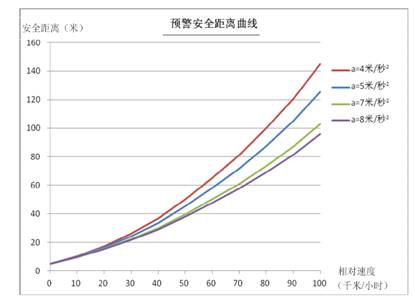
五.结论
通过前面推导可以得出结论: 防汽车追尾预警系统是完全可以实现的,在前后车相对速度较小时,采用不同的制动加速度,预警安全距离相差不大;但在前后车相对速度较大时,采用不同的制动加速度,预警安全距离相差很大。希望早日开发出低成本的防追尾预警系统,使之能够成为汽车行业的标准配置,同时对已在使用的汽车可以加装防追尾预警系统。有了追尾预警装置,汽车驾驶员可以及时得到追尾提醒,采取刹车或转向等安全措施,一定会大大减少追尾事故发生的几率。